 25.06.2015, 18:30
25.06.2015, 18:30
|
#21 | |
|
Senior Member
Регистрация: 02.06.2015
Адрес: Москва
Сообщений: 168
Вес репутации: 0  |
Цитата:
Второй, рыжий, ему, понятное дело, раз он рыжий, все по фигу )) |
|

|

|
|
12.09.2015, 16:29
|
#22 |
|
Junior Member
Регистрация: 12.09.2015
Адрес: Полтава
Сообщений: 8
Вес репутации: 0 |
Мой мелкий (тестовый) робот.
Времени серьезно заняться нет, так после работы по вечерам балуюсь....    Прога на компе (самописная) и смарте для управления по WIFI   Ну и тестовый заезд |
|
|
|
|
26.09.2015, 21:17
|
#23 |
|
Junior Member
Регистрация: 16.07.2014
Адрес: Сланцы. Лен. область.
Возраст: 50
Сообщений: 14
Вес репутации: 0 |
О, робот-брат! )))
Причём реализовано то, что я сейчас делаю во второй версии - поворот камеры. И интерфейс похож. ))) Но у меня нет радара и датчиков по углам, зато есть гироскоп с уровнемером, и датчик напряжения батареи.  Вопросик 1 - На чём написана прога для компа? Вопрос 2 - WiFi далеко берёт? (мой второй больной вопрос. Даже антенну впаял внешнюю. Помогло, но не сильно, процентов на 30)  ..  Но тут интерфейс старый. Теперь на весь экран, с наложением инфы сверху. Последний раз редактировалось Stiger; 26.09.2015 в 21:25. |
|
|
|
|
26.09.2015, 21:54
|
#24 |
|
Junior Member
Регистрация: 12.09.2015
Адрес: Полтава
Сообщений: 8
Вес репутации: 0 |
1. прога написана в Visual Studio 2010
2. у меня без антенны метров на 50 ездил - дальше как то не пробовал (завтра днем проверю). В проекте использована Arduino Mega Датчик напряжения есть в программе микроконтролера(при просадке ниже 6 в робот останавливается и пищит) - но еще не научился выводить инфу через роутер  на комп на комп
|
|
|
|
|
27.09.2015, 23:26
|
#25 |
|
Junior Member
Регистрация: 16.07.2014
Адрес: Сланцы. Лен. область.
Возраст: 50
Сообщений: 14
Вес репутации: 0 |
У меня 50 метров только с внешней антенной. И то - максимум. Собираюсь побеспредельничать - бустер поставить на 2,4 ГГц, на 1 Ватт. Посмотреть, какая дальность будет.
На даче испытываю. --- Я писал на VB.NET (Visual Studio) --- У меня обмен так - посылаем на робота определённую команду (регулярно, по таймеру, например два раза в секунду) по которой ардуина в ответ шлёт нужные данные. Мы их тут же ловим, и выводим на форму. --- Арлуина обычная (не мега), шилд с гироскопом и акселерометром, и шилд с мотор-драйвером. Кстати, у тебя два мотора ведущих, или четыре? Я у себя два отключил вынув передаточные шестерни. Проблем не наблюдаю. И ещё - энкодеры встроенные есть ? Используешь? Я - пока нет, но подумываю подключить. |
|
|
|
|
19.10.2015, 02:12
|
#26 |
|
Junior Member
Регистрация: 19.05.2015
Сообщений: 8
Вес репутации: 0 |
[IMG]RzqJhvv7E2U.jpg[/IMG][IMG]kRcGH7N9uF0.jpg[/IMG][IMG]7fSPdyCNRQ.jpg[/IMG]
Uno + Yun + l293d shield + c270 + два шаговых двигателя + два стабилизатора (повыш. и пониж.), 1300 mah 7,4 в., usb hub + 3d печатанный кузов. Только нет нормальной вебморды. Если кто скинет в личку, буду очень признателен. Последний раз редактировалось Hellogen-klg; 19.10.2015 в 02:17. |
|
|
|
|
20.10.2015, 22:51
|
#27 |
|
Junior Member
Регистрация: 25.01.2015
Адрес: Москва
Сообщений: 4
Вес репутации: 0 |
Представляю своего робота.
 База Tp-Link 3020 c конвертером уровней логики. Прошивка и софт с этого форума, за что спасибо Admin. Единственное, чтобы в Интернет не держать открытым порт 8080 видео завел через видео сервер ZoneMinder (работает у меня круглосуточно). Камера Microsoft HD3000 на 2 сервомашинках, HD-video идет 15 fps без проблем. Контроллер на китайский Arduino nano, использовал 2 штуки: 1 драйвер всего механического, 2 телеметрия (уровень заряда аккумулятора и дальномер сверху на камере) - идет возврат информации по ком порту в роутер + на нем horn(), чтобы можно было управлять пока он издает звуки. Таким образом расширил количество вводов/выводов. Все распаял на макетке: контроллеры, DC-DC 5 V, драйвер двигателей L293D. Снизу платы, соответсвенно, колхоз. 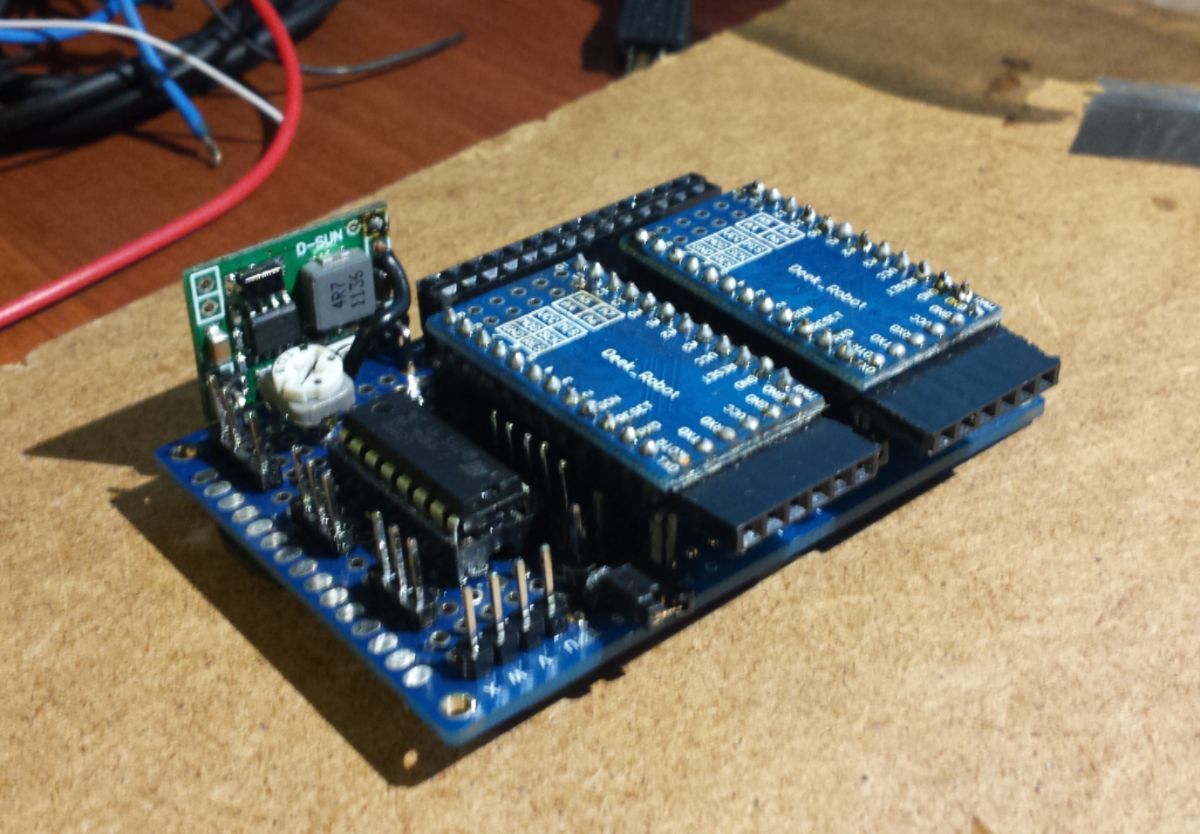 Шасси - бывший робот, аккумулятор от ноутбука (заказывал в китае).  Схема  Многие сложные функции хочу вынести на сервер, где обрабатывать данные. Пока на все не хватает времени. Роботом управлял через интернет на расстоянии 800 км. Последний раз редактировалось feduke; 20.10.2015 в 23:22. |
|
|
|
|
20.10.2015, 22:53
|
#28 |
|
Administrator

Регистрация: 12.04.2010
Адрес: Москва
Сообщений: 9,618
Вес репутации: 9823  |
Картинки лучше к сообщению прикрепить, а то они на сторонних файловых обменниках не долго проживут
|
|
|
|
|
31.10.2015, 18:54
|
#29 |
|
Junior Member
Регистрация: 16.07.2014
Адрес: Сланцы. Лен. область.
Возраст: 50
Сообщений: 14
Вес репутации: 0 |
Шасси симпатичное. Схема тоже серьёзно накручена.
Вопросик - 1. Какие данные задумано обрабатывать на сервере (вроде, кроме дальномера (ближнего действия), внешних датчиков нет)? 2. Мне кажется, или рядом с камерой ещё и лазерный излучатель. От СД-привода или лазерной указки. Так? 3. Можно посмотреть внешний вид программы управления, или веб-странички? |
|
|
|
|
02.11.2015, 22:04
|
#30 | |
|
Junior Member
Регистрация: 25.01.2015
Адрес: Москва
Сообщений: 4
Вес репутации: 0 |
Цитата:
2. Лазер от игрушки для животных из фикспрайс. 3. Модуль управления CyberBot-3 с этого форума. Только заменил фрейм вывода видео на страницу из ZoneMinder, чтобы видео из дома в интернет по порту 8080 не торчало. Выводит напряжение и показание дальномера. 2 скетча управления для каждого из ардуино. Основа - скетч с этого же форума. Шасси Rover Spy Tank (1000 р.), дешевле было с купить это с рук, чем из китая заказывать. Потроха выкинул, так как процессор слабый и сеть работает только в режиме ad-hoc, для ведроида не подходит. |
|
|
|
|
 |
| Здесь присутствуют: 19 (пользователей: 0 , гостей: 19) | |
|
|



 Линейный вид
Линейный вид

